Mars 2020漫游车将寻找微生物化石
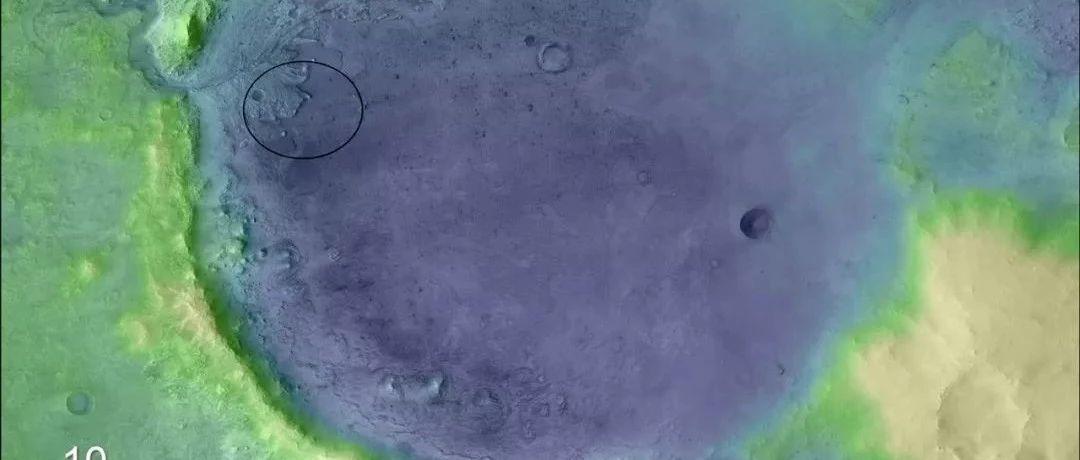
这幅火星耶泽洛陨石坑(Jezero Crater)的图像中,浅色代表海拔高的区域,Jezero陨石坑是美国航空航天局(NASA)Mars 2020漫游车的着陆点。图中椭圆形标记的地点正是Mars 2020漫游车的预定着陆点,漫游车将于此处着陆火星。 版权:NASA / 喷气推进实验室-加州理工学院(JPL-Caltech )/马林空间科学系统公司(MSSS)/约翰霍普金斯大学-应用物理实验室(JHU-APL)/ 欧洲航天局(ESA) NASA的Mars 2020漫游车将于2021年2月18日在火星表面着陆,科学家们发现其着陆地点,即Jezero陨石坑可能是寻找古代生命迹象的最佳地点之一。 Jezero陨石坑是一个距今约35亿年的古老湖泊的遗迹,最近发表于《伊卡洛斯》(Icarus)期刊上的一篇论文表明在陨石坑内部边缘发现了碳酸盐沉积。在地球上,碳酸盐有助于形成坚固的结构,这些坚固结构能够以诸如贝壳、珊瑚和叠层石等化石的形式保存数十亿年。叠层石是由远古微生物沿着古老的水体岸线形成的叠层状生物沉积构造,其生成环境阳光和水分充足。 Jezero陨石坑中碳酸盐的浓度之所以像“浴缸环”一样沿着湖岸线分布,是由于火星上可能存在类似叠层石的结构,这也使该区域成为科学界“热点地区”。 NASA的下一代火星探测器Mars 2020的研究重点是天体生物学亦即关于整个宇宙生命的研究。NASA的“好奇号”(Curiosity)火星探测器曾发现火星上的部分区域在数十亿年前可能曾具备支持微生物生命存在的环境,而Mars 2020漫游车配备了一套新的科学仪器,旨在以好奇号的发现为基础,继续对火星进行探索。Mars 2020漫游车将通过采集沉积在火星表面金属管中的岩芯样本,来寻找过去微生物生命存在的实际迹象。这些样本可能会在未来的任务中被送回地球以进行更为深入的研究。 除了保存古代生命的迹象外,碳酸盐还可以告诉我们关于火星是如何从存在液态水和浓厚大气转变成如今这种冰冷的荒漠星球的更多信息。由二氧化碳和水之间的相互作用形成的碳酸盐矿物中记录了这些相互作用随着时间推移而发生的微妙变化。从这种意义上来说,这些碳酸盐矿物就如同时间胶囊一样,科学家们可以借此研究火星是什么时候开始变干燥的,以及变化过程是怎样的。 Jezero陨石坑宽约28英里(45公里),曾经是古老的河流三角洲。从NASA的火星勘测轨道飞行器(Mars Reconnaissance Orbiter,MRO)从太空拍摄的图像中可以发现穿过陨石坑底部的三角洲臂状结构。MRO上的紧凑型火星勘测成像光谱仪(Compact Reconnaissance Imaging Spectrometer for Mars instrument, CRISM)帮助生成了陨石坑中类似“浴缸环”的矿物图,关于该矿物图的详细介绍可参见新发表的论文。 [rml_read_more] 这个关于飞越火星表面的动画解释了为什么火星上的Jezero陨石坑是Mars 2020漫游车发现并收集未来大有可能被送回地球的样本的最佳地点。Jezero陨石坑宽约28英里,属于古老的湖泊三角洲系统。 论文的第一作者,来自普渡大学(Purdue University)的布里奥尼•霍根(Briony Horgan)表示:“CRISM多年前就已在Jezero陨石坑发现了碳酸盐,但直到最近我们才注意到它们集中分布在曾是湖岸的区域。在整个任务过程中,我们将在许多地点发现碳酸盐沉积物,但“浴缸环”将是最令人兴奋的访问地点之一。” 科学家们无法保证分布于湖岸的碳酸盐是在湖泊中形成的;它们也可能在湖泊出现之前就已经沉积在那里了。但这些碳酸盐的发现使陨石坑的西部边缘(即“含碳酸盐的边缘地带”)成为陨石坑中碳酸盐含量最丰富的宝库之一。 火星上的Jezero陨石坑是NASA的Mars 2020 漫游车的着陆点,这幅Jezero陨石坑的图像中已添加颜色来突出显示其中所含的矿物质。绿色代表碳酸盐矿物,这种矿物尤其适合保存地球上的生物化石 版权:NASA/JPL-Caltech/MSSS/JHU-APL/Purdue/美国地质勘探局(USGS) Mars 2020任务团队希望在为期两年的主要任务期间对陨石坑底部和三角洲区域进行探索。Horgan表示,任务团队希望在任务预定期限结束前能够到达陨石坑边缘的碳酸盐沉积带。 来自加州帕萨迪纳的NASA喷气推进实验室(JPL)的Mars 2020副项目科学家肯•威利福德(Ken Williford)表示:“‘边缘地带的碳酸盐’在湖泊环境中形成的可能性是我们引领我们前往Jezero着陆点的最令人兴奋的特征之一。古老湖岸的碳酸盐化学是保存古代生命和气候记录的绝佳方法。我们迫切地希望到达火星表面,去研究这些碳酸盐是如何形成的。”JPL负责领导Mars 2020任务。 Jezero陨石坑过去的湖岸线并不是科学家们唯一感兴趣的地方。《地球物理研究快报》(Geophysical Research Letters)的一项新研究指出,在远古河流三角洲地区的边缘存在富含水合二氧化硅的沉积物。这种矿物与碳酸盐一样擅长保存古代生命的迹象。如果该地点被证实是三角洲的底层,那么这里将会是寻找埋藏微生物化石的理想场所。 Mars 2020 漫游车将于2020年7月或8月在佛罗里达州卡纳维拉尔角空军基地发射升空。JPL的Mars 2020项目为位于华盛顿的NASA总部科学任务理事会管理漫游车的研发工作。位于佛罗里达州肯尼迪航天中心的NASA发射服务项目负责发射管理工作。 Mars 2020 是一个更广泛计划中的一部分,其中包括登月任务,以此为人类探索火星做准备。NASA将于2024年将宇航员再次送上月球,并将通过阿尔特弥斯月球探测计划在2028年前在月球及其周围建立一个持续的人类存在。 位于马里兰州劳雷尔市的约翰霍普金斯大学应用物理实验室负责MRO上的CRISM研究。 关于Mars 2020的更多详细信息,请访问: https://mars.nasa.gov/mars2020/ https://www.nasa.gov/mars2020 来源: https://www.nasa.gov/feature/jpl/nasas-mars-2020-will-hunt-for-microscopic-fossils